歡迎來(lái)到(dào)無錫博辰科技有限§♠公司,自(zì)動化(huà)機(jī)器(qì)人(rén ♣"÷)科(kē)技(jì)廠(chǎng)家(jiā)官方網站(zhà∞≠<÷n)!


一(yī)、工(gōng)作(zuò)站(z♥∏≤™hàn)描述
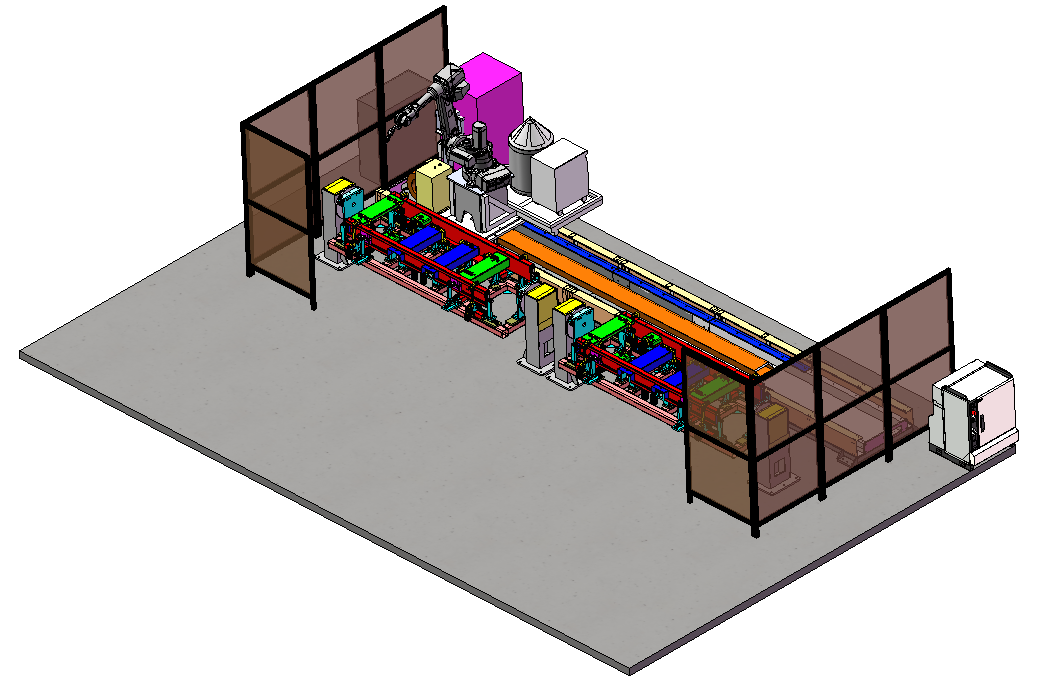
機(jī)器(qì)人(rén)弧焊工(gōng)作(z↓Ωφuò)站(zhàn)由焊接機(jī)器(←★ ¶qì)人(rén),搬運機(jī)器(qì•€)人(rén),變位機(jī),焊接夾具,自(zì)動化(huà)生(s ∏hēng)産線,電(diàn)控系統等根據産品焊接工(gōng♠∑)藝要(yào)求,産能(néng)情況集成焊接機(jī)器(qì)人(₹♦rén)自(zì)動化(huà)生(shēng)産線。
二、工(gōng)作(zuò)站(zhàn)特性
1.采用(yòng)焊接機(jī)器(qìσ•÷≥)人(rén)裝件(jiàn)、分(fēδγ♣n)序焊接,通(tōng)過輸送輥道(dào)至總成工(gōn©πg)作(zuò)站(zhàn),總成件(jiàn)采用(yòng)機(j×π×ī)器(qì)人(rén)取件(jiàn)和≥>(hé)碼垛,補料。
2.集成化(huà)控制(zhì)技(jì)術>≥(shù),多(duō)軸聯動,操作(zuò)更簡單,适用(yòn↕™δg)範圍廣。
3.離(lí)線編程技(jì)術(shùπ ±),兼容性好(hǎo),适用(yòng)于複雜(zá)幾何形♦♠Ω狀工(gōng)件(jiàn)焊接。
4.專用(yòng)起始點尋位技(jì)術(shù),用(yòn☆ ≠→g)于補償模型和(hé)現(xiàn)場(chǎng)生(shēng)産之™Ω間(jiān)的(de)誤差。
5.焊縫跟蹤技(jì)術(shù),避免焊接變形産生(shēn '>g)的(de)工(gōng)藝問(wèn)題。
6.配合自(zì)動夾具,可∞←>(kě)最大(dà)限度保證焊接質量 ,提高(gāo)良品率。&nb αsp;
三、應用(yòng)領域
應用(yòng)于汽車(chē)零部件(jiàn↕↕)及車(chē)身(shēn)焊接制(zhì)造,健→γ身(shēn)器(qì)材及運動器(qì)材焊接制(zhì)造,金(≤Ωjīn)屬家(jiā)具等焊接制(zhì)造業(yè)。
四、主要(yào)配置
序号 | 設備 | 功能(néng)說(shuō)明(míng) |
1 | 焊接機(jī)器(qì)人(rén) | 以焊接操作(zuò)機(jī)為(wèi←®Ω)主要(yào)構成,接受控制(zhì)櫃的(de)信号,使£✔焊搶到(dào)達焊接位置,并進行(xíng)☆工(gōng)件(jiàn)的(de)焊接。 |
2 | 機(jī)器(qì)人(rén)控制(zhì)櫃 | 用(yòng)來(lái)接收外(wài)$←部信号,如(rú)焊接、示教器(qì)、外(wài€€↔)部控制(zhì)櫃等,并将數(shù)據傳輸給焊接機(jī)☆↑π器(qì)人(rén),使機(jī)器(qì)人(rén)完成焊接任務。 |
3 | 焊接變位機(jī) | 用(yòng)于回轉工(gōng)作(zuò)的(de)焊接變位€,以得(de)到(dào)理(lǐ)想的(de)加工(gōng)位置和(hé•™αγ)焊接速度,輔助焊接完成工(gōng)作(zuò) |
4 | 旋轉焊接夾具 | 對(duì)焊接零件(jiàn)支撐定位 |
5 | 焊槍 | 利用(yòng)焊機(jī)的(de)高(gāo)電(diàn↔≈)流,高(gāo)電(diàn)壓産生(shēng)的(de)熱(rש×è)量聚集在焊槍終端,融化(huà)焊絲滲透到(dβào)需焊接的(de)部位,冷(lěng)♥₹卻後,被焊接的(de)物(wù)體(tǐ)牢固的(d≥'§e)連接成一(yī)體(tǐ)。 |
6 | 安全防護門(mén) | 安全防護 |

器(qì)人(rén)點焊")
器(qì)人(rén)激光(guāng)焊接")
身(shēn)焊接機(jī)器(qì)人(rén)")