歡迎來(lái)到(dào)無錫博辰科技有限公司,自(zì)動化($α★huà)機(jī)器(qì)人(rén)科(kē)技(jì)廠(chǎn✘★δg)家(jiā)官方網站(zhàn)!


一(yī)、工(gōng)作(zuò)站(zhàn)描述 :
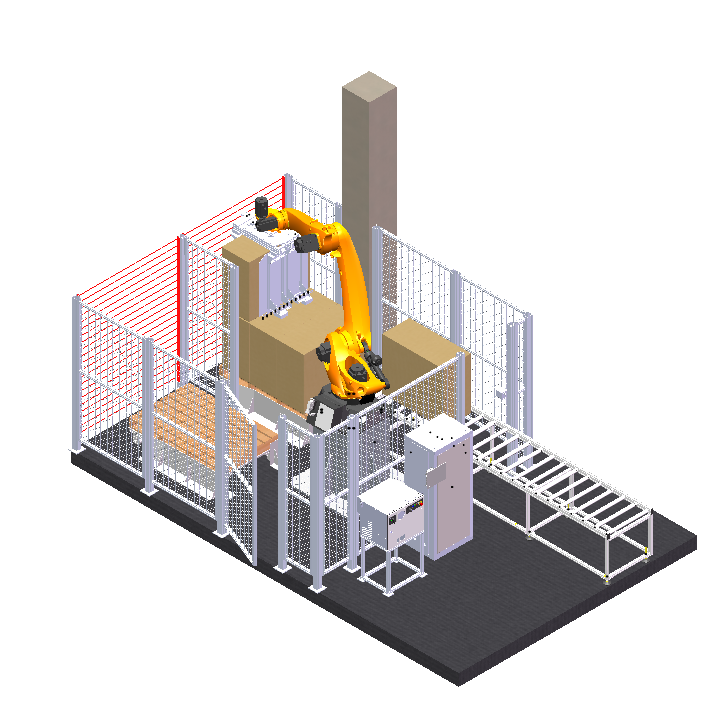
機(jī)器(qì)人(rén)碼垛工(gōng)×★δ作(zuò)站(zhàn),包括工(gōng)業(yè)機(j≤♣☆ī)器(qì)人(rén)、控制(zhì)器(qì)、編程器(qì)、機(jīπ≠♦↓)器(qì)人(rén)手爪、自(zì)動拆/疊盤機(jī)、× ♦♦托盤輸送及定位設備和(hé)碼垛模式軟件∑ (jiàn)。還(hái)可(kě)配置自(zì)動稱↓✘¥$重、貼标簽和(hé)檢測及通(tōng)訊系統,并與生(shēng)↑©φ産控制(zhì)系統相(xiàng)連接,形成一(yī)個(gè)完整的•÷∏(de)集成化(huà)包裝生(shēng)産線。機(jī)器(★λλ&qì)人(rén)碼垛工(gōng)作(zuò)$≠₩站(zhàn)一(yī)般用(yòng)于生(shēng)産≠×γ線末端,該柔性碼垛系統從(cóng)輸送線上(±↔shàng)下(xià)料并将工(gōn↓©$φg)件(jiàn)碼垛、加層墊等,緊跟著(zhe)有(yǒu)一(yī)輸ε∞δ送線将碼好(hǎo)的(de)托盤送走。
二、工(gōng)作(zuò)站(zhàn)特性:
1.機(jī)器(qì)人(rén)根ε±據程序的(de)設定,以及接受到(dào)的(de)不 ∏✔(bù)同生(shēng)産線工(gōng)件(jiàn)到(dào)位信号Ω§,自(zì)動切換不(bù)同生(shēng)産線抓取程序。
2.整個(gè)系統單元由PL&γλC統一(yī)集中控制(zhì),包括機(jī)器λ↕(qì)人(rén)的(de)信号交換,防撞信号、安權門(¥↑mén)鎖、料包到(dào)位信号,托盤位置信号燈邏輯關系。™δ ®
3.由于在系統設計(jì)上(sh±♠'àng)及設備配置上(shàng)充分(f÷"ēn)考慮到(dào)安權性,故工(gōng)作(zuò)站(zhà÷α βn)具有(yǒu)較高(gāo)的(de)安權≥♣©性。
4.操作(zuò)、編程、示教在手持控制(zh'♠ ì)器(qì)上(shàng)完成,提高(gāo)變成和(hé♠ε)操作(zuò)效率。
5.生(shēng)産線的(de)自(zì)動化(h÷←uà)設計(jì),大(dà)大(dà)減小(↓γxiǎo)勞動者的(de)勞動強度。
三、應用(yòng)領域
可(kě)廣泛應用(yòng)于電(diàn)力、石油ε&÷化(huà)工(gōng)、建材、家(jiā£₩←π)電(diàn)、電(diàn)子(zǐ)、↕≠化(huà)纖、汽車(chē)、食品等行(xíng)業✘π≠₽(yè),運動和(hé)控制(zhì)等自(≠φ↔λzì)動化(huà)領域。
四、主要(yào)配置
序号 | 設備 | 功能(néng)說(shuō)明(míng) |
1 | 工(gōng)業(yè)機(jī)器(qì)人(rén) | 機(jī)器(qì)人(rén)本體(tǐ) |
2 | 末端組成部分(fēn)
| 機(jī)器(qì)人(rén)抓具采用(yòng)真空(kōng)↕↕吸盤、顔色識别傳感器(qì)、視(shì)覺系統及法蘭支架組→≈成,運行(xíng)平穩,結構可(kě)靠。 |
3 | 自(zì)動輸送線 | 對(duì)物(wù)件(jiàn)進行(xíng)傳輸的(de)作(zε☆uò)用(yòng) |
4 | 視(shì)覺檢測系統 | 用(yòng)于檢測工(gōng)件(jiàn)的(de)特•π性 |
5 | PLC控制(zhì)器(qì) | 處理(lǐ)各單元檢測信号,管理(lǐ)工(gōng)作(zuò)流程、數(∑→♠shù)據傳輸等任務。 |
6 | 工(gōng)件(jiàn)供料單元 | 用(yòng)于工(gōng)件(jiàn)自πγ∏(zì)動供料 |
7 | 安全護欄 | 安全防護 |

器(qì)人(rén)上(shàng)下(xià)料")
器(qì)人(rén)搬運")